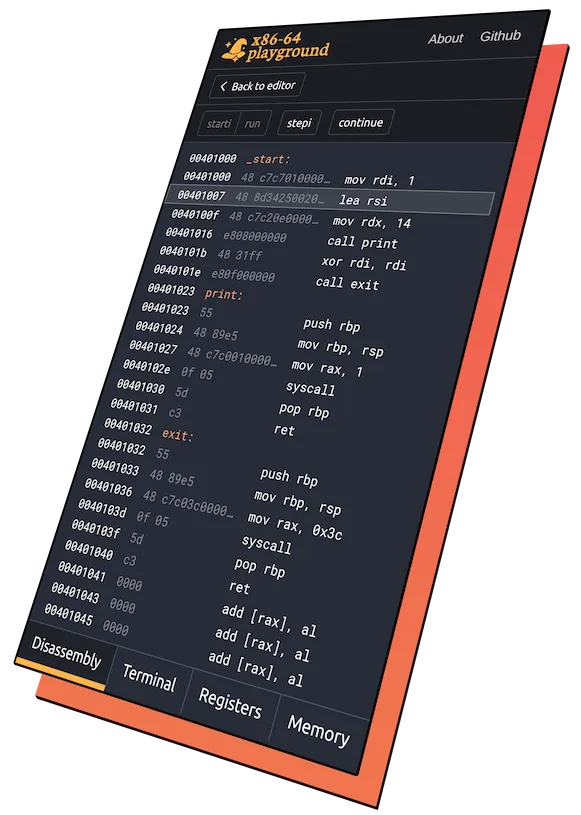
x86-64 Playground is a web app for experimenting and learning x86-64 assembly.
The Playground web app provides an online code editor where you can write, compile, and share assembly code for a wide range of popular assemblers such as GNU As, Fasm and Nasm.
Unlike traditional onlide editors, this playground allows you to follow the execution of your program step by step, inspecting memory and registers of the running process from a GDB-like interface.
You can bring your own programs! Drag and drop into the app any x86-64-Linux static executable to run and debug it in the same sandboxed environment, without having to install anything.
L=π×d=π×m×zcap L equals pi cross d equals pi cross m cross z B. Load and Force Calculations
The calculated values represent ideal theoretical loads. However, real-world applications demand the application of safety factors to account for load variations, shocks, and long-term reliability.
cap T equals the fraction with numerator cap F sub u center dot cap D and denominator 2000 center dot eta end-fraction is the pitch diameter in mm and is the system efficiency) Linear Velocity ( rack and pinion calculations pdf
The module is the defining metric for gear teeth size. It represents the pitch diameter divided by the number of teeth. $$m = \fracdz$$
Electric linear actuator, moving 500 kg horizontally, μ=0.05 (linear guides), acceleration 2 m/s², max speed 0.5 m/s. Pinion module 3 mm, 25 teeth, steel, 20° pressure angle. L=π×d=π×m×zcap L equals pi cross d equals pi
For a comprehensive guide on rack and pinion calculations , focus on defining the module, sizing the pinion, and calculating the forces required for movement. 1. Core Gear Geometry
The total normal force acting on the tooth surface. $$F_n = \fracF_t\cos(\alpha)$$ cap T equals the fraction with numerator cap
The torque (T) required to move the rack is calculated as follows:
Have you ever seen a responsive debugger? The app places the mobile experience at the center of its design, and can be embedded in any web page to add interactivity to technical tutorials or documentations.
Follow the guide to embed in your website both the asm editor and debugger.
The app is open-source, and available on Github. It's powered by the Blink Emulator, which emulates an x86-64-Linux environment entirely client side in your browser. This means that all the code you write, or the excutables you debug are never sent to the server.
everything runs in your browser, and once the Web App loads it will work without an internet connection.